For starters, it offers two similar functions for transferring data over the SPI bus, called "xfer" and "xfer2". Both take a single parameter which is a list of bytes to transfer. According to the documentation, the difference is that for "xfer"...
"CS will be released and reactivated between blocks. delay specifies delay in µsec between blocks."
and for "xfer2"...
"Perform SPI transaction. CS will be held active between blocks."Its not completely obvious what a "block" is in this context. I can only guess (and hope) that it might mean between two consecutive invocations of the "xfer2" function (I can't think of anything else useful that it could mean). Also, the reference to "delay" in the description of "xfer" is the only reference to a parameter, attribute or anything else called "delay" anywhere in the documentation.
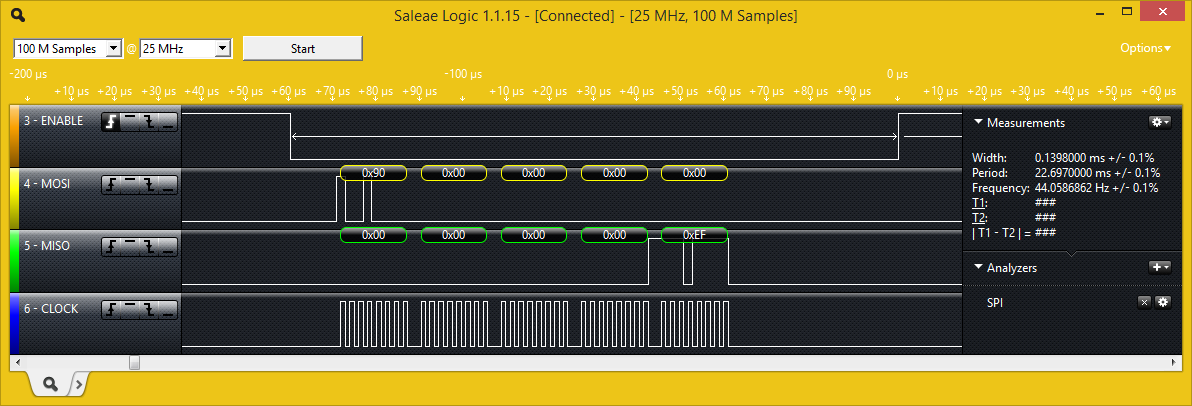
Anyway, no matter how much I tried, I couldn't see any difference between the behaviour of "xfer" and "xfer2". Time to break out the logic analyser. Looking at two successive calls to "xfer"...
root@alarmpi:~# python
Python 2.7.3 (default, Mar 18 2014, 05:13:23)
[GCC 4.6.3] on linux2
Type "help", "copyright", "credits" or "license" for more information.
>>> import spidev
>>>
>>> spi = spidev.SpiDev()
>>> spi.open(0,0)
>>>
>>> spi.xfer([0x90,0,0,0,0])
[0, 0, 0, 0, 239]
>>> spi.xfer([0x90,0,0,0,0])
[0, 0, 0, 0, 239]
I pasted the commands in, so the two calls to "spi.xfer" happened very close together in time.

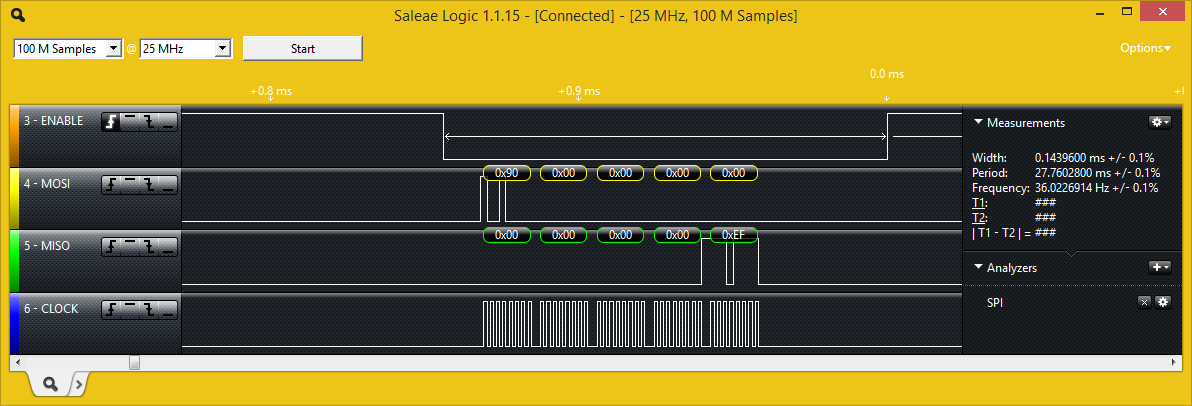
Now to try the same test using "xfer2" instead of "xfer". As I interpret the documentation, the /CS line should stay low between transfers, so that two consecutive calls to "xfer2" would actually look like a single SPI bus transaction, albeit with a bit of a hiatus in the middle. However, that is not what happens.

Which brings me to the mysterious "delay" parameter. It turns out that the "xfer" and "xfer2" functions both take three additional parameters (determined by studying the SpiDev source code).
spi.xfer([values], speed_hz, delay_usecs, bits_per_word)
You can set "speed_hz" to 0 and it will default to the maximum supported speed. "delay_usecs" goes into a 16-bit unsigned integer, so it looks like the longest you can stretch the /CS hold delay by is 65.5ms. Worth a shot:-
>>> spi.xfer2([0x90,0,0,0,0], 0, 65535)
spi.xfer2([0x90,0,0,0,0], 0, 65535)
[0, 0, 0, 0, 239]
>>> spi.xfer2([0x90,0,0,0,0], 0, 65535)
[0, 0, 0, 0, 239]
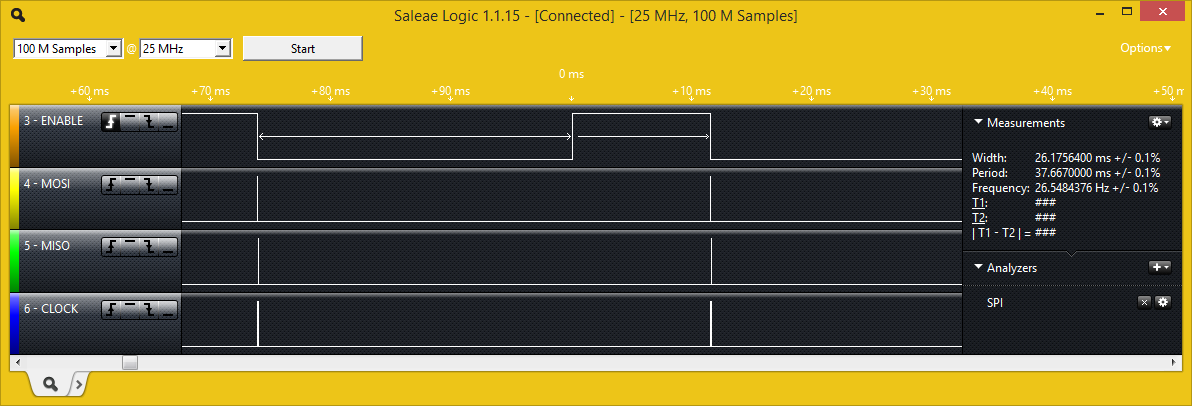
It definitely did something: /CS now stays low for 26ms after the transaction is complete. Its not the 65.5ms we were expecting, though.
I determined experimentally that the delay used is actually modulo 40,000us. Any value up to 40,000 works as it should...any value higher than 40,000 has 40,000 subtracted from it. This is true whether I use "xfer" or "xfer2": I still can't find any difference in behaviour between the two.
Returning to the SpiDev module source code, the lack of any behavioural difference between "xfer" and "xfer2" isn't surprising: it turns out that both of them actually make exactly the same IOCTL call to the SPI kernel module with a spi_ioc_transfer structure populated in exactly the same way. That structure does actually contain a member called "cs_change" which is described as:-
@cs_change: True to deselect device before starting the next transfer...which sounds exactly like it should be the difference between "xfer" and "xfer2". However, neither method actually sets this structure member either way. So it looks like the value for this parameter that is passed to the kernel is what ever random value is in memory when the space for the structure is allocated. It seems like it should be easy to fix so I will try modifying the source code to correct this problem. But not tonight...that's an update for another day.
What I really wanted to do but (apparently) can't is to read continuously from the SPI flash IC. All I should have to do is send it a "read" command and a start address, and then just keep reading from it in one big, 1,048,576-byte long transaction and it should happily return the entire flash contents in sequence. This works fine on an Arduino: I set up the "read" operation and then just keep feeding it values (it doesn't matter what I send...its the value that the flash IC returns that I'm interested in) with the /CS pin held low. However, with "xfer2" not working as it should, there seems to be no way to spread a single SPI bus transaction among multiple method calls. Even if "xfer2" did work its not ideal. There is a "readbytes" function which would be more appropriate because it doesn't require me to send it in a list of values to transmit (which will all be ignored anyway). However, there is no "readbytes2" (working or otherwise) which would allow the /CS to be held low between successive calls.






